Deckenerneuerung per Mobile Laserscanning
Eine mittlerweile weit verbreitete und etablierte Methode für die dreidimensionale Erfassung der Erdoberfläche ist die Laserscanning-Technik. Besonders der Bestand hochfrequentierter Verkehrswege lässt sich mit dem Mobile Laser Scanning effizient und sicher erfassen und für Straßenplanungen nutzen.
Im Auftrag des RP Freiburg führte die TopScan GmbH im folgenden Projekt die mobile Datenerfassung durch, die Auswertung der Daten übernahm die Alber Ingenieurvermessung GmbH mit dem Vermessungs- und Entwurfssystem card_1.



Die Rheintalautobahn A 5 in Baden-Württemberg bei Offenburg und Freiburg muss aufgrund der hohen Verkehrsbelastung in den kommenden Jahren ertüchtigt werden. Dabei soll der vorhandene Oberbau ausgebaut und durch neue Beläge ersetzt werden. Für die notwendigen Planungsmaßnahmen sind auf fast 30 km Länge aktuelle Bestandsdaten zu erheben.
Neben den Fahrbahnrändern, Markierungen, Bordstein- und Bauwerkskanten, Banketträndern, Schutz- und Leiteinrichtungen müssen auch punktförmige Objekte, wie Straßenabläufe oder Beschilderungen erfasst und ausgewertet werden.
Zu den entscheidenden Kriterien für die Auswahl der Erfassungsmethode zählen die Effizienz, eine möglichst geringe Verkehrsbehinderung, die Sicherheit aller Verkehrsbeteiligten und die Wirtschaftlichkeit. Diese Projektvorgaben führen schnell zum Mobile Laser Scanning Verfahren (MLS). Den Auftrag für die Bestandsdatenerfassung mittels MLS führte die Firma TopScan GmbH aus Rheine durch.
Mobile 3D Datenerfassung
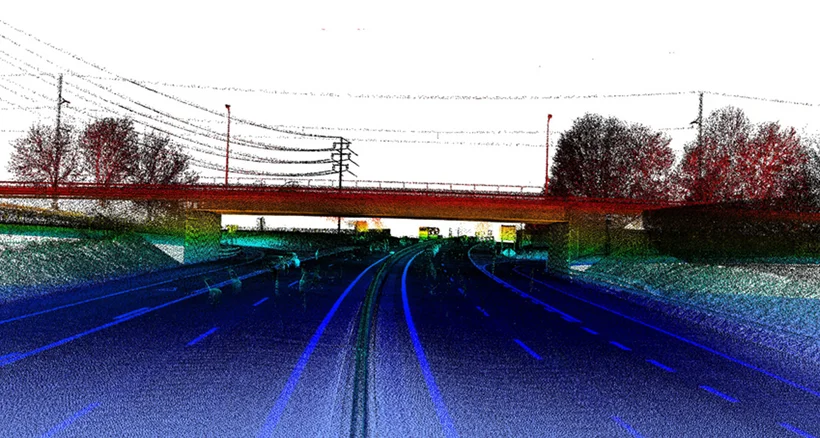
Beim MLS ist das Laserscanning-System auf einer mobilen Plattform angebracht, in diesem Fall auf einem Fahrzeug. Während der Fahrt wird die unmittelbare Umgebung des Fahrzeugs mittels Laserentfernungsmessungen kontinuierlich erfasst. Unter Verwendung von GPS-/IMU-Daten wird die geometrische Information der gescannten Oberfläche in Form einer 3D-Punktwolke gespeichert. Diese Punktwolke besteht aus XYZ-Koordinaten und kann neben der geometrischen Information zu jedem Punkt noch weitere Attribute enthalten, etwa den Intensitätswert. Die Punktwolke ist der Ausgangspunkt für die Ableitung unterschiedlichster Produkte und für detaillierte Analysen.
Projektgebiet A 5
Das Projektgebiet erstreckt sich über zwei voneinander getrennte Abschnitte auf der vierstreifigen A 5 zwischen Offenburg und Freiburg mit insgesamt ca. 26 km Länge. Aufgrund der baulichen Zustandsklassen ist eine Deckenerneuerung in diesen Abschnitten dringend erforderlich. Der erste Abschnitt verläuft von Offenburg bis zur Anschlussstelle Lahr, der zweite von der Tank- und Rastanlage Mahlberg bis zur Anschlussstelle Herbolzheim. In den betroffenen Autobahnabschnitten ist jeder Fahrstreifen einzeln aufzumessen, Anschlussstellen bzw. Park- und Rastlagen sind nicht zu erfassen.
Geringe Beeinträchtigung des Verkehrs
Die Messfahrten wurden mit einer Geschwindigkeit von ca. 60 km/h durchgeführt. Um den laufenden Verkehr so geringfügig wie möglich zu beeinträchtigen, fand die Messung an einem Samstag im Dezember 2011 statt. In weniger als drei Stunden reiner Messfahrt wurde jede Fahrspur und zusätzlich ein Baustellenbereich komplett erfasst. Durch die Absicherung der Messfahrten und der Regelung des Folgeverkehrs mit zwei Fahrzeugen der Straßenmeisterei war der Samstagsverkehr nur geringfügig beeinträchtigt.
Auswertung der Daten
Im Anschluss an die Messfahrt erfolgt das Postprocessing, die Berechnung der eigentlichen Laserscannerdaten im Innendienst. In diversen aufeinander aufbauenden Arbeitsschritten ist zunächst die Sensororientierung zu berechnen. Hierzu zählt die GPS-Trajektorienbestimmung und die GPS-IMU-Integration, wobei in Bezug auf die Genauigkeit die Trajektorienbestimmung die determinierende Komponente darstellt. Die Position wird bei TopScan aus einer Kombination von DGPS, einem Trägheitsnavigationssystem (IMU mit 200 Hz) und einem Wegnehmer am Hinterrad (DMI) bestimmt.
Zusätzlich zu den GPS-Empfangsdaten am Fahrzeug sind die Daten von GPS-Bodenstationen, die das Projektgebiet komplett umschließen, in die Berechnungen einzubeziehen. Anschließend erfolgt die Überprüfung der Systemkalibrierung. Für jeden Sensor und jeden Fahrabschnitt werden die Laserscannerpunkte einzeln ausgegeben und analysiert. In den Streifenüberlappungsbereichen wird nach ebenen Flächen segmentiert und im Ausgleichungsansatz werden die Sensorkalibrierungsparameter so bestimmt, dass sich die Differenzen zwischen den zugeordneten Ebenen minimieren.
Auf Basis der Trajektorie und den exakt auf die Befahrung abgestimmten Kalibrierungsparametern erfolgt dann die Berechnung der Laserscannerpunkte. Ergebnis sind stabile, homogene und ausgeglichene 3D-Punktwolken. Durch den finalen Abgleich mit den signalisierten Passpunkten wird die Punktwolke weiter stabilisiert und in ihrer absoluten Genauigkeit gesteigert.
Von der Erfassung zum card_1 Projekt
Die mittels MLS erfassten Laserscannerdaten bilden die Grundlage für die Auswertung der Bestandsdaten. Alle für die Planung der Deckenoptimierung erforderlichen Objekte sind aus diesen Daten zu extrahieren.
Das Ingenieurbüro Alber Ingenieurvermessung aus Filderstadt setzt für die weitere Verarbeitung der 3D-Punktwolken das Vermessungs- und Entwurfssystem card_1 ein. Nach dem Import der Daten in card_1 sind aus den Scannerdaten Bestandsprofile zu generieren, die geforderten Objekte zu digitalisieren und mit den entsprechenden Kodierungen zu versehen.
Zur Bearbeitung werden u.a. die Möglichkeiten genutzt, die Laserscannerpunkte mit anderen Vermessungsdaten zu kombinieren, direkt in der Punktwolke Kontrollmaße zu nehmen oder auch die Punktwolken in allen Projektansichten für optische Kontrollen darzustellen. Als zusätzliche Informationsquelle für die Bestandsauswertung stehen die während der Laserscannermessung aufgenommenen Bilddaten zur Verfügung.
Arbeiten mit den Daten
Der Fahrbahnoberbau des gescannten Projektgebietes besteht aus mehreren, insgesamt 24 cm dicken Schichten, die vor ca. 15 Jahren im bituminösen Hocheinbau auf der darunterliegenden Betondecke eingebaut wurden. Die Betondecke, die rund 40 Jahre alt ist, wurde dabei vorab zertrümmert. Mehrere Sanierungskonzepte stehen zur Prüfung, die auf umfangreichen oberbautechnologischen Untersuchungen basierend entwickelt wurden. Dabei ist neben der Wirtschaftlichkeit auch die Gesamtlebensdauer und damit die Nachhaltigkeit ein entscheidendes Kriterium.
Jede Richtungsfahrbahn hat derzeit eine Breite von 11,50 m. Zur Erhöhung der Verkehrssicherheit, insbesondere bei Baustellensituationen, ist eine Verbreiterung beider Richtungsfahrbahnen auf 12,0 m vorgesehen. Die im Mittelstreifen anzuordnenden passiven Schutzeinrichtungen werden auf Grundlage der neuesten Richtlinien entwickelt. Ein Gesamtkonzept steht auch hier zurzeit in der abschließenden Prüfung.
Punktwolke dient als Grundlage
Die vorhandenen Unter- und Überführungsbauwerke sind Zwangspunkte in der Höhe. Die Gradiente der Autobahn ist in Abhängigkeit von dem gewählten Sanierungskonzept entsprechend anzupassen. Sowohl für die Planung der Deckenoptimierung als auch für weitere Auswertungen und Analysen, wie Profilentwicklungen, Mengen- und Massenberechnungen, sind die vorhandenen Fahrbahnränder exakt zu bestimmen. Die 3D-Punktwolke dient in card_1 auch hier als Grundlage für die Digitalisierung dieser Ränder. card_1 bietet für die Gradienten-Optimierung zwei Varianten.
Mithilfe der Gradientenapproximation lässt sich für einen vorhandenen Geländelängsschnitt automatisch eine Gradiente erzeugen. Eine erweiterte Fassung steht im Modul Deckenoptimierung zur Verfügung. Hier wird u.a. zusätzlich die jeweils linke und rechte Breite/Querneigung berücksichtigt. Vollkommen automatisch sucht das Programm aus einer Vielzahl von Varianten die optimale Gradiente heraus.
Für die A 5 liegt bereits eine berechnete Mittelachse vor. Die Deckenoptimierung erfordert allerdings für jede Richtungsfahrbahn eine optimierte Gradiente. Da der Abstand Mittelachse – Fahrbahngradiente sich über ein Breitenband definieren lässt, ist die Berechnung zusätzlicher Fahrbahnachsen nicht erforderlich. So lässt sich der gesamte zweibahnige Querschnitt, bezogen nur auf die Mittelachse, iterativ optimieren. Mit Hilfe der OKSTRA-Deckenbuch Funktionen lässt sich die Optimierung des zweibahnigen Querschnitts visualisieren und kontrollieren.
Fazit
Nicht nur die Sicherheit für Personal und Verkehrsteilnehmer, sondern auch die geringfügige Beeinträchtigung des fließenden Verkehrs stellen einen wesentlichen Vorteil des Mobile Laser Scannings gegenüber stationären Verfahren dar. Ebenso ist der wirtschaftliche Vorteil bei Projekten dieser Größenordnung nicht von der Hand zu weisen.
Die berechnete 3D-Punktwolke bildet die erfassten Objekte mit hoher Genauigkeit und Auflösung ab. Leider wird der Detailreichtum der Laserscannerdaten durch die Extraktion von Objekten noch nicht vollständig genutzt. Wünschenswert wäre eine wesentlich größere Bedeutung der Punktwolke als Träger der Basisinformation. Nichtsdestotrotz sind die per Laserscanning erfassten Punktwolken für die Aufgaben und Anwendungen im Tiefbau sehr gut geeignet, zumal CAD-Systeme, wie card_1, den hohen Informationsgehalt der Daten bereits in vielen Bereichen nutzen.
Auftraggeber:
Regierungspräsidium Freiburg
Herrn Michael Bausch
Abteilung 4, Referat 44
Bissierstraße 7, 79114 Freiburg
Tel. +49 761 208-0
Fax +49 761 208-1006
www.rp.baden-wuerttemberg.de
Zeitraum:
2007 - 2012
Auftragnehmer:
TopScan GmbH
Düsterbergstr. 5
48432 Rheine
Tel. +49 5971 94803-0
Fax +49 5971 94803-99
www.topscan.de
E-Mail an TopScan
Alber Ingenieurvermessung GmbH
Pulsstraße 10
70794 Filderstadt
Te. +49 711 7012-95
Fax +49 711 70794-00
www.alber-vermessung.de
E-Mail an Alber GmbH